
マイクロビットで動きを制御する、二足歩行ロボットをつくります。
前回の記事(こちら)で、どのようなロボットにするかを考え、それを踏まえて、マイクロビットで4つのサーボモーターを制御できることを確認し、回路構成を決定しました。
今回は、3Dプリンタでいくつかのパーツを作成し、実際にロボットの筐体を組み立てていきます。
材料
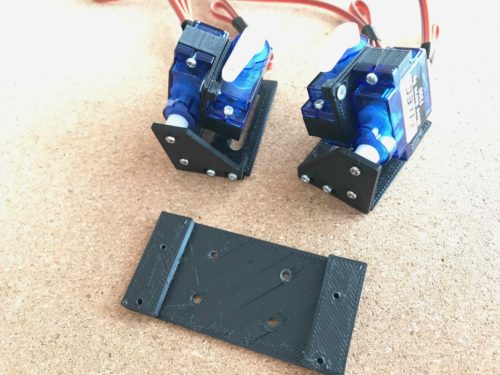
3Dプリンタで以下のようなパーツを作成しました。

その他に、4つのサーボモーター、マイクロビット、エッジコネクタピッチ変換基板、単4×3の電池ボックス(スイッチ付、エネループが3本入っています)を使います。


組み立て
まず最初に、サーボモーターを取り付ける脚の部分をつくります。
これらのパーツを使います。

ネジでふたつのパーツをくっつけます。

それぞれの面に、ネジでサーボモーターを取り付けます。

次に、足の部分をつくります。
足の裏面と前面のパーツを別々につくっているので、それらをネジでとめます。


先ほどつくった脚の部分に、足を取り付けます。

できあがった脚のパーツを、胴体(下半身)のパーツに取り付けます。
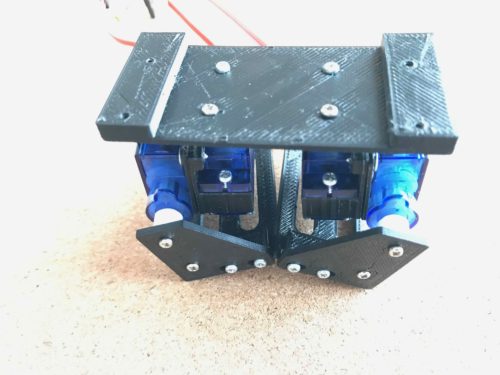
その上に、胴体(上半身)のパーツを取り付けます。


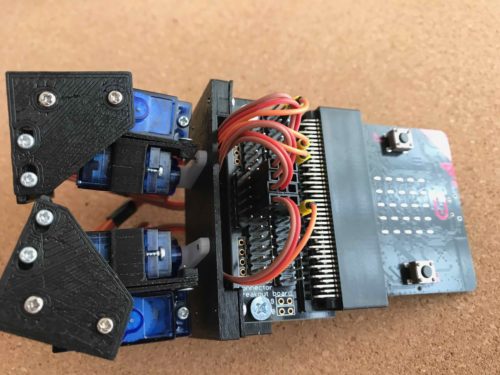
3Dプリンタでつくったパーツは、全て組み立て終わったので、エッジコネクタピッチ変換基板を取り付けます。
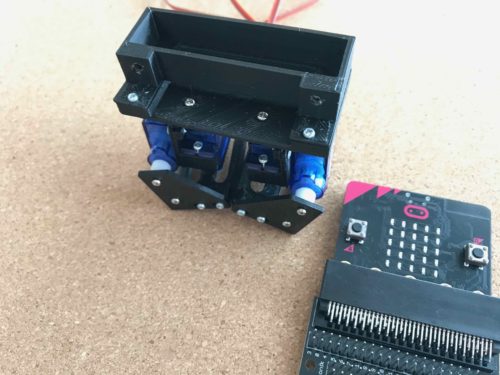

胴体の上半身と下半身の隙間から、サーボモーターの配線を前面に引き出します。
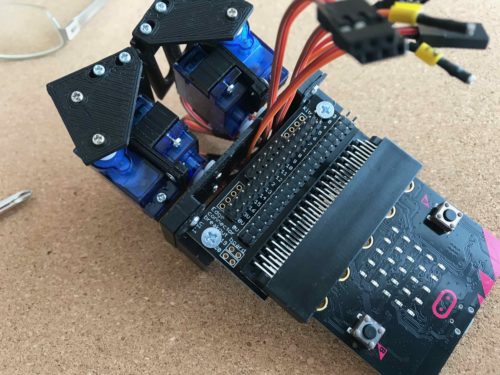
なお、前回の記事では、エッジコネクタピッチ変換基板にピンソケットを取り付けることで、コネクタと基板の間に隙間を確保し、コネクタからジャンパー線で信号を取り出していましたが、それでは接続が煩雑になってしまうので、コネクタから信号線だけを取り外すことにしました。
これで、信号線の接続が簡単になります。

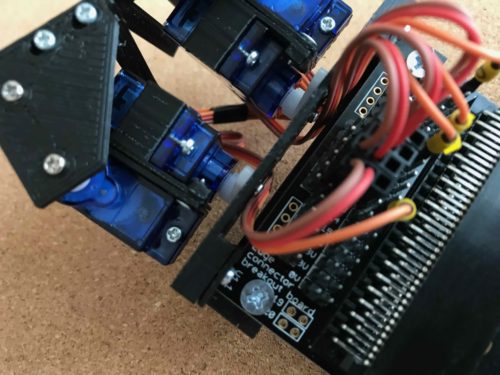
サーボモーターの電源・グランド(コネクタ)、信号(コネクタから取り外したもの)を、それぞれエッジコネクタピッチ変換基板につなぎます。
なお、サーボモーターの信号線はそれぞれ、以下の端子につなぎました。
| 右足首 | 0番ピン |
| 右足付け根 | 1番ピン |
| 左足首 | 2番ピン |
| 左足付け根 | 8番ピン |
この記事を書いた後に発売開始された「M5:bit」という拡張ボードには、はじめから電源、グランドにピンヘッダが取り付けられており、それらと入出力端子(GPIO)が2.54mmピッチで並んでいます。 このため、「エッジコネクタピッチ変換基板」の代わりに「M5:bit」を使うことで、特別な加工をせずにマイクロビットとサーボモーターをつなぐことができるようになります。 今後、この記事と同様のロボットをつくる場合は、「M5:bit」を使う方が良いと思います。 「M5:bit」を使ったマイクロビットとサーボモーターのつなぎ方については、こちら の記事をご覧ください。 なお、「M5:bit」では「8番ピン」が外に出ていません。「左足付け根」のサーボモーターについては、8番ピンの代わりに「16番ピン」などをつかってください。
最後に、電池ボックスをエッジコネクタピッチ変換基板につなぎます。
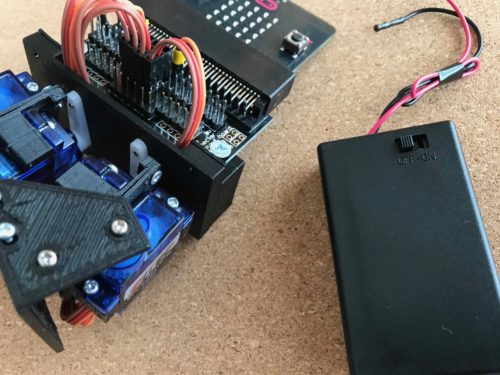
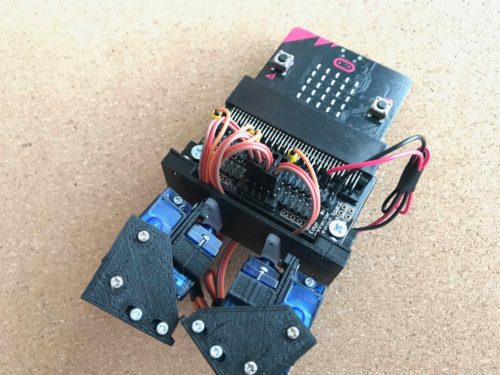
電池ボックスは、胴体(上半身)のスロットに差し込んで固定します。

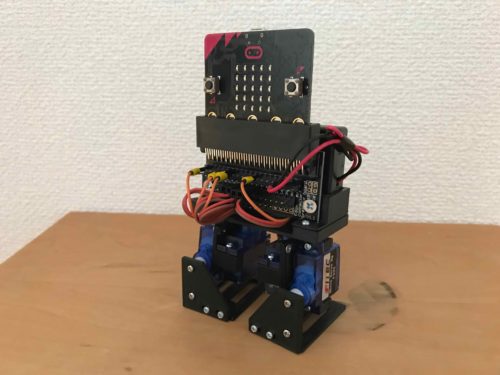
これで、筐体はできあがりです。
なお、私がマイクロビットの使い方を習得するのにあたっては、以下の書籍を参考にさせていただきました。
初心者向けから、比較的高度なものまで、さまざまな情報が記載されているだけでなく、子供向けの作例も多数掲載されていますので、「プログラミング教育」のための題材さがしなどにもおすすめです。

