知り合いの方から、タミヤの「マイコンロボット工作セット(クローラータイプ)」をお借りしました。
マイクロビットと超音波センサを搭載した走行ロボットです。

リンク
今回は、これを組み立ててみます。
パーツはこのようになっています。

説明書どおりに組み立てていきます。

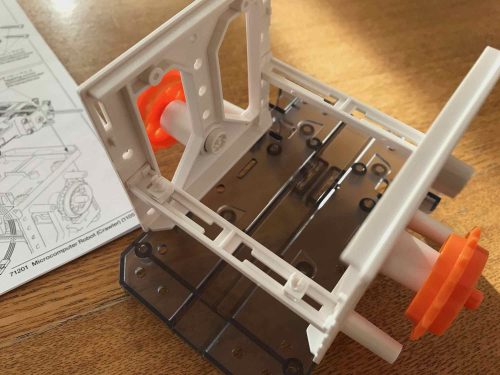
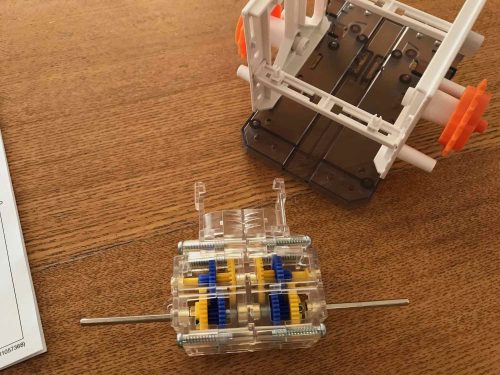
シャーシを組み立てると、このようになります。
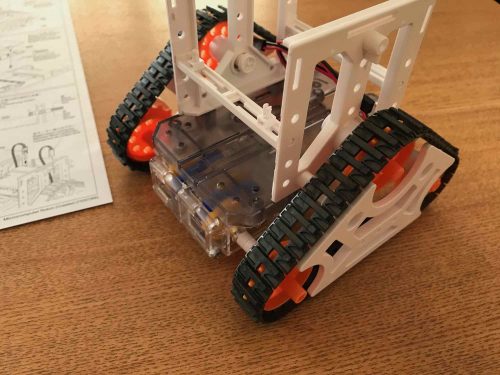
基板はこんな感じです。
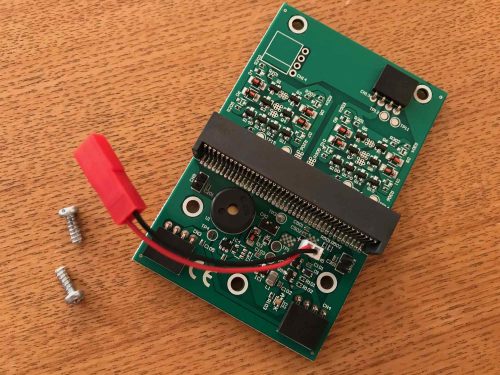
マイクロビットと基板を組み立てると、このようになります。

基板と超音波センサを、シャーシに取り付けます。
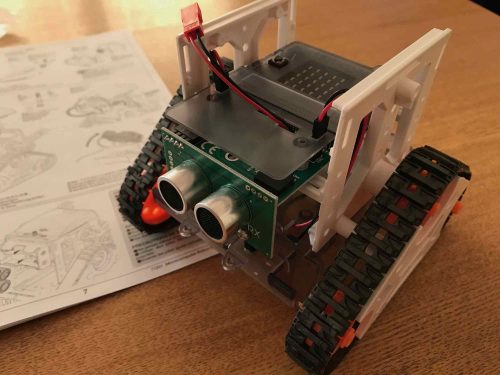
ロボットの腕などのパーツも取り付けます。

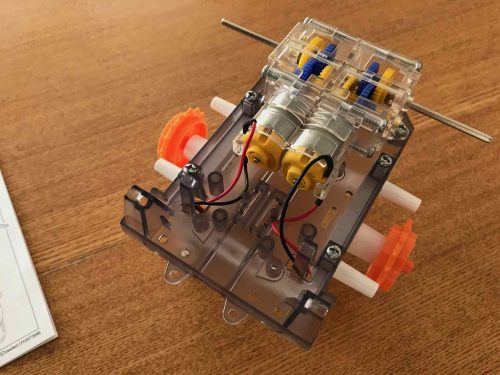
電池ボックスやスイッチも、シャーシに取り付けます。

これでできあがりです。

付属していたマイクロビットには、以下の2種類のプログラムがプリインストールされています。
- 超音波センサで、障害物をよけながら走行するプログラム(Aプログラム)
- もうひとつマイクロビットを用意し、それをコントローラにして操縦するプログラム(Bプログラム)
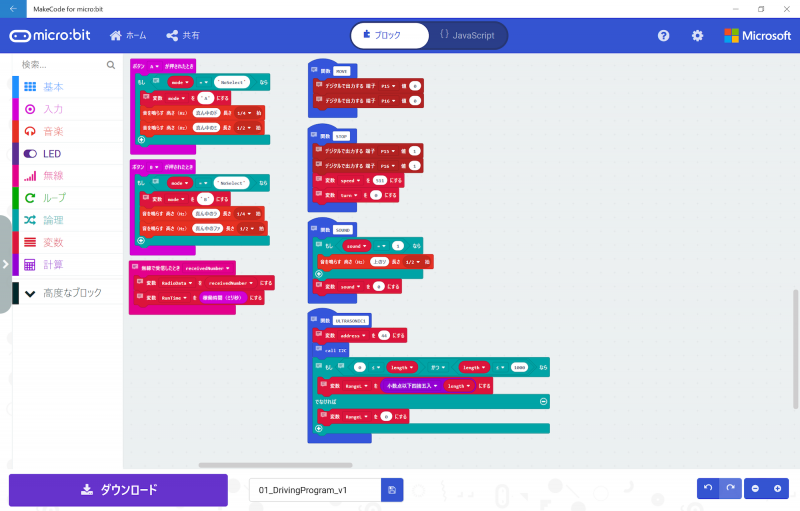
プログラムの内容は以下のようになっています。
「最初だけ」、「ずっと」ブロックは以下のとおりです。
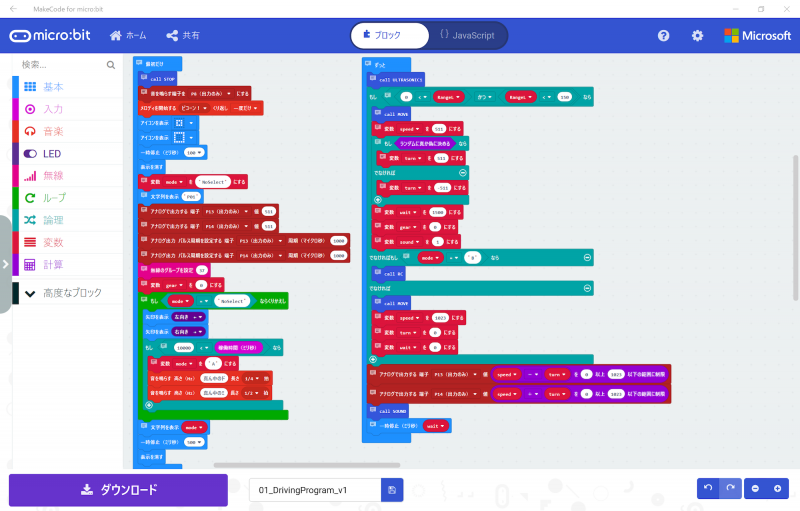
「ボタンAが押されたとき」、「ボタンBが押されたとき」、「無線で受信したとき」ブロック、および「最初だけ」や「ずっと」から呼び出される各関数は以下のとおりです。
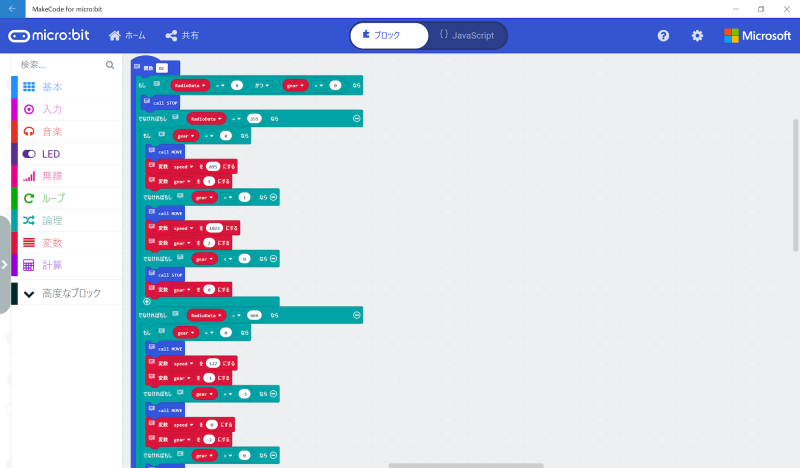
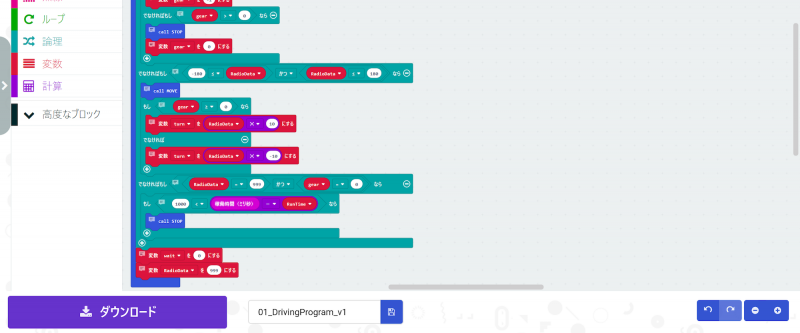
「ずっと」から呼び出される「RC」関数は以下のとおりです。
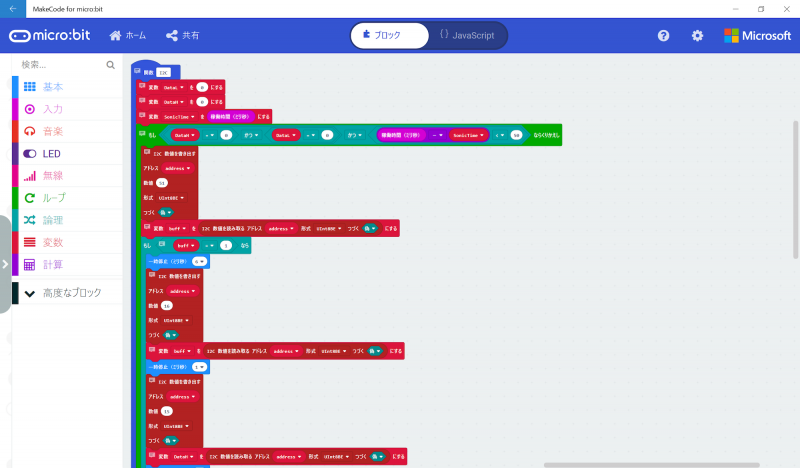
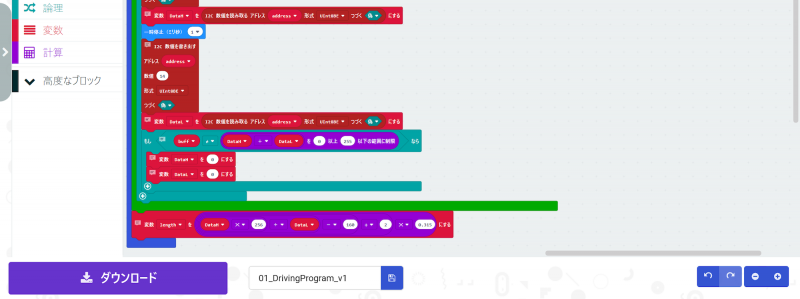
「ULTRASONIC1」関数から呼び出される「I2C」関数は以下のとおりです。
電池を入れてスイッチをオンにし、10秒程度放置すると、Aプログラムがそのまま動作します。

写真を撮りながら作っていましたが、1時間半程度で製作できました。
リンク
なお、私がマイクロビットの使い方を習得するのにあたっては、以下の書籍を参考にさせていただきました。
リンク
初心者向けから、比較的高度なものまで、さまざまな情報が記載されているだけでなく、子供向けの作例も多数掲載されていますので、「プログラミング教育」のための題材さがしなどにもおすすめです。
リンク
