
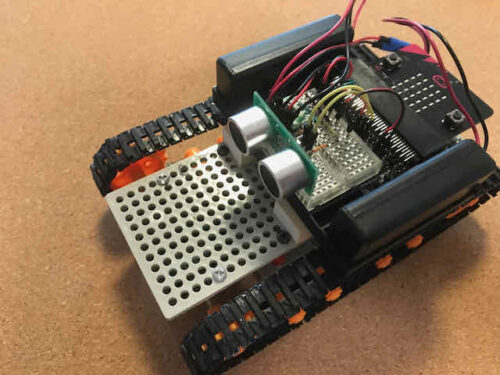
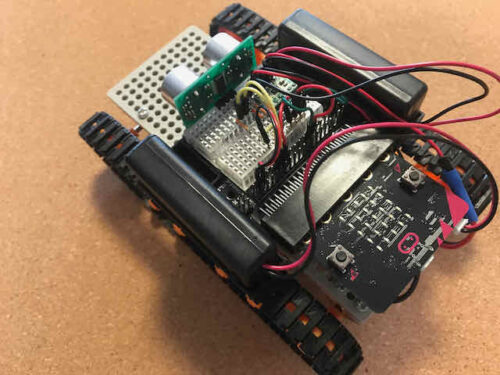
「タミヤ 楽しい工作シリーズ組み立てキット リモコンロボット」に、マイクロビットと「超音波距離センサ」を取り付け、障害物に近づいたら自動で向きを変えるロボットをつくってみます。
リンク
リンク
回路図はこちらです。
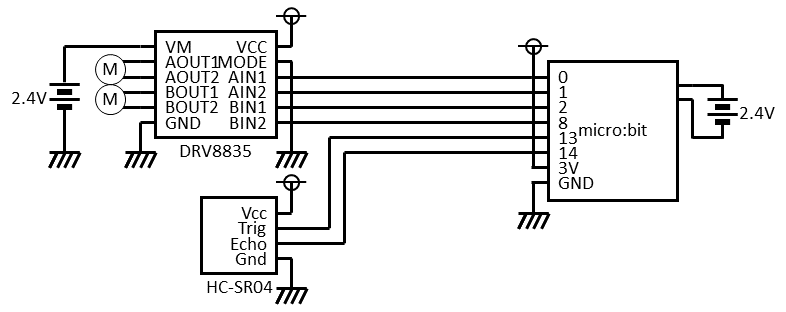
マイクロビットとモータードライバ(DRV88535)、超音波距離センサ(HC-SR04互換品)をつなぎ、モータードライバとロボットのふたつのモーターをつなぎます。
モーターを動かすときの電源ノイズでマイクロビットが誤動作してしまわないように、今回は、モーター用、マイクロビット用で別々に電池を用意します。
マイクロビットから6本の信号を取り出す必要があり、小さな端子も使うことになるため、マイクロビットを「エッジコネクタ」に差し込み、エッジコネクタから信号線を取り出しています。
リンク
スケッチはこちらです。
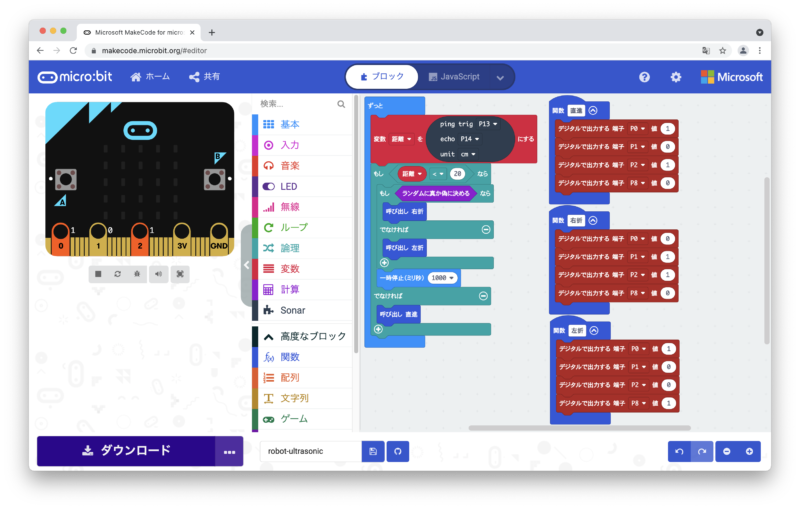
通常は直進しますが、障害物との距離が20センチ以下になると、1秒間、右折もしくは左折します。
右折か左折かはランダムに決まります。
結果はこちらです。
直進し、壁に近づくと向きを変えます。
なお、私がマイクロビットの使い方を習得するのにあたっては、以下の書籍を参考にさせていただきました。
リンク
初心者向けから、比較的高度なものまで、さまざまな情報が記載されているだけでなく、子供向けの作例も多数掲載されていますので、「プログラミング教育」のための題材さがしなどにもおすすめです。
リンク

