
サーボモーターをふたつ使って、簡単な「ロボットアーム」のようなものをつくり、マイクロビットで制御してみようと思います。
アームを「左右」「上下」に動かせるようにします。
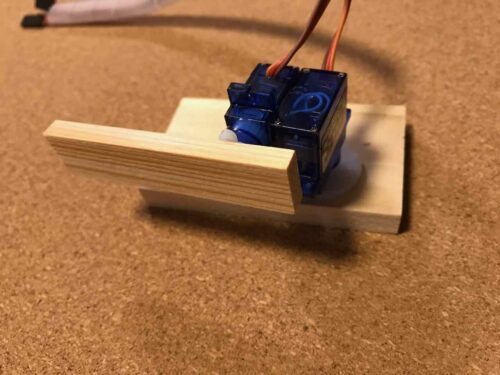
まずは筐体をつくります。
ふたつのサーボモーターを、回転軸が90度ずれるように両面テープで貼り付けます。

木の板をふたつ準備し、それぞれにサーボホーンを木ネジで取り付けます。
大きい方がベース(土台)、細長い方がアームになります。

サーボモーターを取り付けます。これで筐体は完成です。
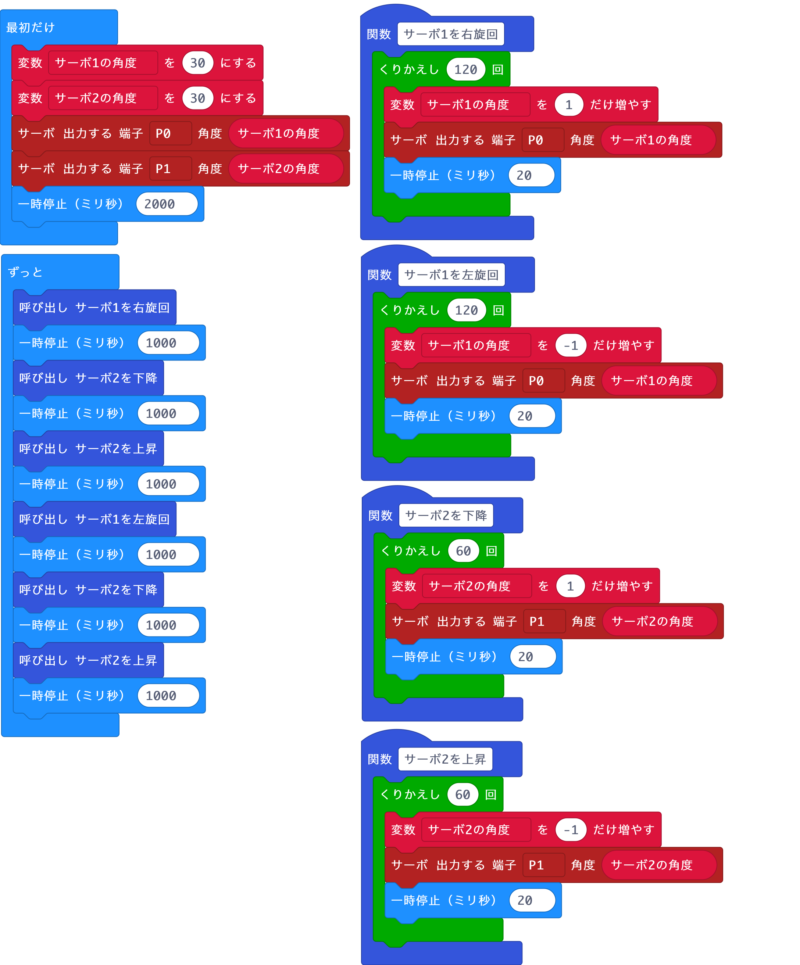
マイクロビットのプログラムはこちらです。
アームを「右方向に旋回」→「下降」→「上昇」→「左方向に旋回」→「下降」→「上昇」を繰り返します。
マイクロビットとサーボモーターをつなぎます。
本来、マイクロビットとサーボモーターは電源電圧が異なるため、別々の電源を用いるか、電圧を変換する回路を使う必要があります。
しかし、今回は両者を同じ電池で動かしたいと思います。電圧変換回路なども使いたくないので、単四型ニッケル水素電池3本を直結して動かそうと思います(おすすめできる方法ではありません)。
ニッケル水素電池1本の電圧は1.2Vなので、3本で3.6Vとなります。マイクロビットの電源電圧上限(3.6V)にギリギリ収まります。
また、今回使うサーボモーターの電源電圧下限は4.8Vですが、試しに3.6Vで動かしてみたところ、なんとか動きましたので、この構成を採用することとします。
両者を簡単に接続するために「M5:Bit」というパーツを使います。
以下のようにつなぎます。
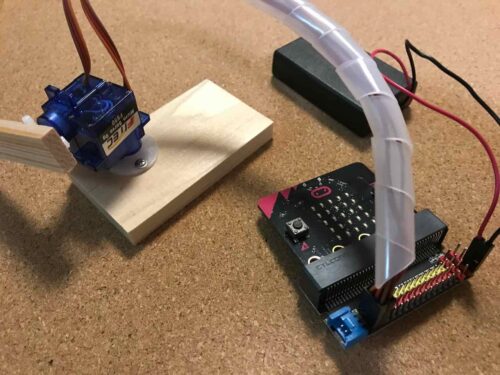
「M5:Bit」の端子は「グランド」「電源」「信号」の順に並んでおり、偶然にもサーボモーターのコネクタをそのまま差し込むことができます。
これで完成です。
電池ボックスの電源を入れて、動かしてみます。
いい感じに動きました。
アームの先に何かを取り付ければ、モノを移動させたりすることもできそうです。
なお、私がマイクロビットの使い方を習得するのにあたっては、以下の書籍を参考にさせていただきました。
初心者向けから、比較的高度なものまで、さまざまな情報が記載されているだけでなく、子供向けの作例も多数掲載されていますので、「プログラミング教育」のための題材さがしなどにもおすすめです。

